

Un robot sumergible surfea con destreza las corrientes marinas
Un robot submarino revolucionario que «surfea» vórtices para desplazarse casi sin energía. Descubre cómo CARL, inspirado en la naturaleza, podría transformar la exploración oceánica y aérea.
Por Enrique Coperías
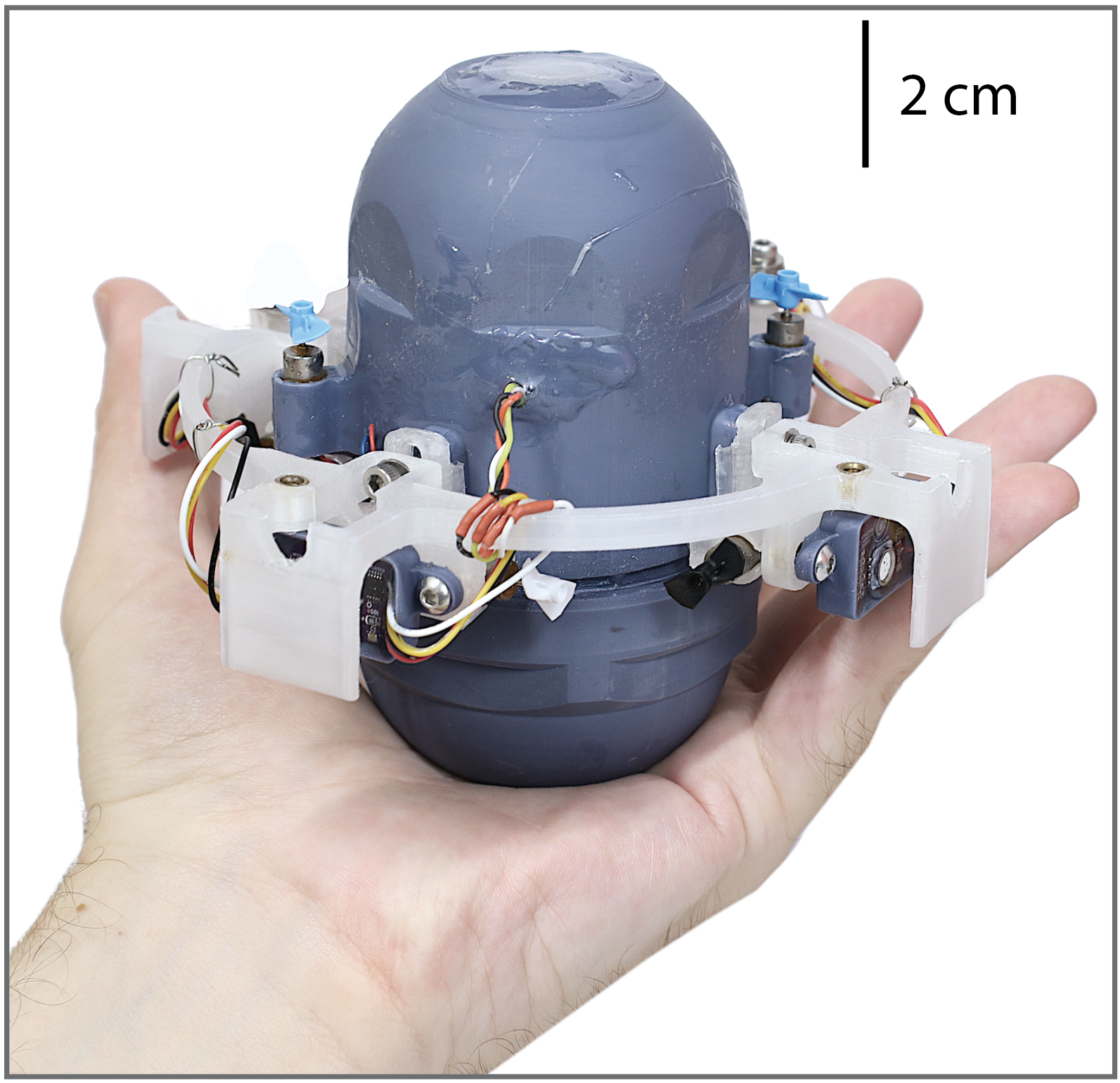
Este es el aspecto de CARL, el robot sumergible que se mueve como pez en el agua. Cortesía: John O. Dabiri and Peter Gunnarson
Un equipo de investigadores del Instituto de Tecnología de California (Caltech), en Estados Unidos, liderado por Peter Gunnarson y John O. Dabiri, ha desarrollado un robot submarino autónomo que logra desplazarse de manera altamente eficiente al aprovechar las corrientes oceánicas. Los detalles de este ingenio tecnológico los recoge la revista científica PNAS Nexus.
El robot, llamado CARL (Caltech Autonomous Reinforcement Learning robot), es capaz de surfear anillos de vórtice en el agua, lo que le permite reducir en casi cinco veces el consumo de energía necesario para moverse en comparación con un robot convencional.
Los anillos de vórtice son estructuras fluidodinámicas en forma de toro, o sea, similares a un dónut, que se forman cuando un fluido, como el aire, el agua y el humo, gira alrededor de un eje circular cerrado. Son un fenómeno común en la dinámica de fluidos y se pueden observar en una variedad de contextos naturales, como las corrientes de agua, e industriales.
Una estrategia inspirada en la naturaleza
Los vehículos submarinos y aéreos autónomos se enfrentan desafíos significativos al navegar en entornos donde predominan ráfagas y corrientes impredecibles. Tradicionalmente, estos vehículos consumen grandes cantidades de energía para contrarrestar estas fuerzas.
Sin embargo, en la naturaleza, animales como los peces, explotan los vórtices generados en su entorno para moverse con menor esfuerzo. Inspirados por este comportamiento, Gunnarson y Dabiri diseñaron un robot que replica esta estrategia, y se sirve de los vórtices de agua para impulsarse sin necesidad de aplicar energía extra.
CARL, del tamaño de la palma de una mano, está equipado con una unidad de medición inercial (IMU), diez motores que permiten el movimiento en tres ejes y un algoritmo de navegación sencillo pero eficaz. Este algoritmo se basa en detectar aceleraciones generadas por el paso de un anillo de vórtice y realizar una maniobra impulsiva en la misma dirección.
Aprovecha los vórtices para avanzar sin esfuerzo
Esta acción permite al robot ser absorbido por el vórtice y desplazarse a lo largo del tanque de pruebas sin gasto energético adicional.
Las pruebas se llevaron a cabo en un tanque de agua de 13.000 litros, donde se generaban anillos de vórtice mediante un propulsor. CARL se colocaba en una posición estratégica y, al detectar la aceleración provocada por el vórtice, nadaba brevemente para ser atrapado en su estructura.
Tras este movimiento inicial, el robot se desplazaba de forma pasiva junto al vórtice a través del tanque.
Los resultados fueron sorprendentes: CARL utilizó aproximadamente una quinta parte de la energía que requeriría un robot tradicional para recorrer la misma distancia. Además, el estudio reveló que el proceso de surfear los vórtices no alteraba significativamente la estructura del vórtice en sí misma, lo que sugiere que esta técnica podría aplicarse de manera sostenible en entornos naturales.
El robot CLARK navega en una corriente de agua.
Un ahorro muy importante de energía
El estudio también profundiza en el análisis de las estructuras coherentes lagrangianas (LCS), superficies o líneas dentro de un flujo fluido que actúan como barreras o guías para el movimiento de partículas a lo largo del tiempo. Estos análisis explican cómo pequeños impulsos iniciales pueden traducirse en grandes ahorros energéticos gracias a la interacción eficiente con estas estructuras de flujo.
Se estimó que CARL gastó solo 16,7 milijulios en el impulso inicial, en comparación con los 82,7 milijulios necesarios para recorrer la misma distancia utilizando propulsión propia continua.
Esta diferencia representa un ahorro energético de casi cinco veces, lo que tiene implicaciones importantes para el diseño de futuros vehículos autónomos, tanto submarinos como aéreos.
Ideal para la exploración oceánica
El éxito del robot CARL abre la puerta a nuevas formas de diseñar vehículos autónomos que aprovechen de manera inteligente los flujos naturales del entorno. Esta técnica podría tener aplicaciones en la exploración oceánica, en la monitorización de ecosistemas y en drones aéreos que naveguen en entornos urbanos con vientos impredecibles.
Además, el estudio sugiere que estrategias similares podrían aplicarse para optimizar la navegación de robots en entornos altamente turbulentos, como debajo de plataformas de hielo en el océano, donde se requieren mediciones críticas relacionadas con el cambio climático.
Indudablemente, la investigación de Gunnarson y Dabiri demuestra que es posible lograr una navegación energéticamente eficiente al interactuar de manera inteligente con los flujos de fondo. El robot CARL es un claro ejemplo de cómo la ingeniería inspirada en la naturaleza puede ofrecer soluciones innovadoras para los desafíos de la exploración autónoma.
Con un mayor desarrollo, esta técnica promete transformar el diseño y la eficiencia de los vehículos autónomos del futuro, al reducir el consumo energético y aumentar la autonomía operativa en entornos complejos, afirman los creadores de CARL. ▪️
Información facilitada por PNAS Nexus
Fuente: Peter Gunnarson, John O Dabiri. Surfing vortex rings for energy-efficient propulsion. PNAS Nexus (2025). DOI: https://doi.org/10.1093/pnasnexus/pgaf031